Opisane lokalizatory elektromagnetyczne LEM wykazują swoją skuteczność tam, gdzie istnieją przewody metalowe, które mogą stanowić źródło generowania fali zwrotnej. W przypadku lokalizacji obiektów zakrytych, szczególnie niemetalowych, stosowana jest metoda georadarowa wykorzystująca narzędziowo radary do penetracji gruntów (ang. Ground Penetrating Radar – GPR ). Metoda georadarowa dostarcza informacje o istnieniu, przebiegu oraz wzajemnym rozkładzie struktur i obiektów podpowierzchniowych. Jej istotą jest odbiór i zapis cyfrowy echa fali elektromagnetycznej, emitowanej w głąb badanego ośrodka.
Odbicie sygnału następuje na granicy ośrodków o różnych względnych przenikalności elektrycznych. Im większe zróżnicowanie względnych przenikalności elektrycznych sąsiadujących warstw, tym większa szansa na jednoznaczne odwzorowanie się granicy między nimi.
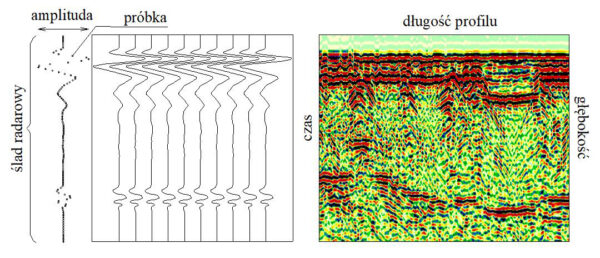
Georadar można traktować jako specyficzny dalmierz, który propaguje w strukturę gruntu lub obiektu, a następnie, z zadaną przez operatora częstotliwością (ang. sampling frequency), próbkuje rejestrowany przez antenę odbiorczą sygnał powrotny. Próbkowana wartość zamieniana jest na postać cyfrową. W ten sposób powstaje próbka numeryczna (ang. sample).
Wartość numeryczna pojedynczej próbki reprezentuje chwilową wartość amplitudy odebranego sygnału.
Rys. 1 Zapis pojedynczego sondowania (A-scan - ślad w danym miejscu) oraz widok w postaci B-scan.
Odbiór oraz próbkowanie pojedynczego impulsu elektromagnetycznego, wyemitowanego w głąb ośrodka, wykonywane są w zdefiniowanym przez operatora przedziale czasu, zwanym oknem czasowym (ang. time window). Aparatura georadarowa rejestruje czas odbioru i wartość pojedynczej próbki. Grupa próbek zarejestrowana w całym oknie czasowym tworzy pojedynczy ślad georadarowy (ang. trace). Ślad georadarowy jest więc zapisem zmian amplitudy odebranego sygnału elektromagnetycznego w czasie. Taki pojedynczy zapis sondowania to tzw. A-scan.
Zapis kolejnych śladów realizowany jest w interwałach czasu lub odległości i skutkuje powstaniem zapisu georadarowego (obrazu cyfrowego) zwanego radargramem. Radargram wygenerowany w wyniku przemieszczania anten georadarowych po tzw. linii profilowej stanowi przekrój ośrodka. Taki zapis profilu to tzw. B-scan.
Uzyskany zapis cyfrowy może być przetwarzany z wykorzystaniem filtrów cyfrowych i analizowany w celu rozpoznania struktur bliskiej podpowierzchni.
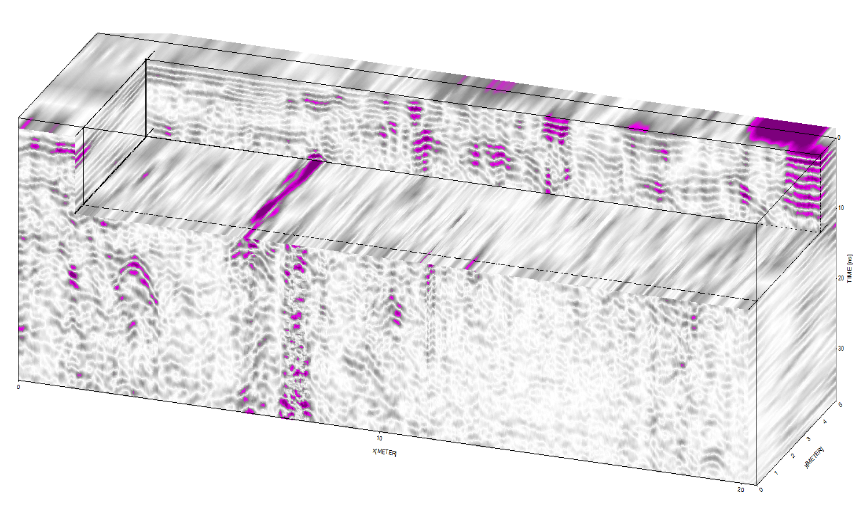
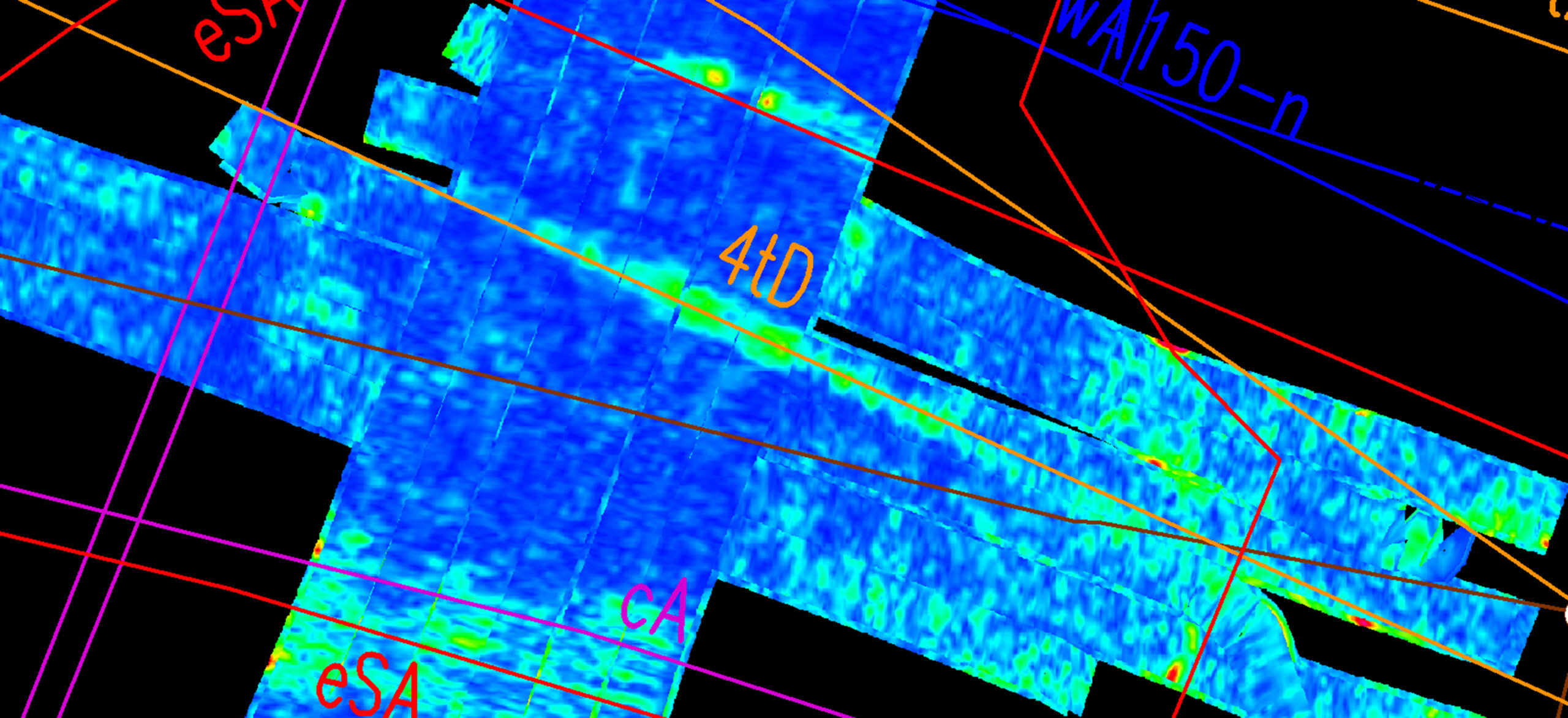
Kilka profilowań typu B-scan wykonanych na zadanym obszarze umożliwia generowanie tzw. C-scanów. C-scan jest „sztucznym” echogramem będącym wynikiem interpolacji informacji z sąsiadujących profilowań.
Rys. 2 C-scan z pomiarów radarem Mala Ramac.
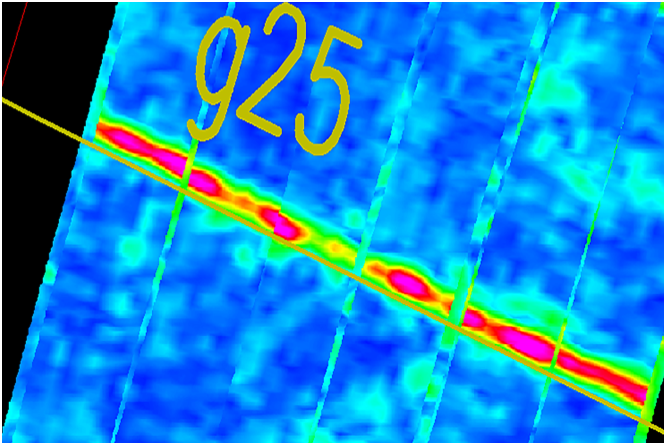
Rys. 3 C-scan z pomiarów radarem Leica Stream C.
Rys. 4 C-scan z pomiarów radarem Leica Stream C.
Previous
Next
Typy pomiarów georadarowych
W pracach georadarowych wyróżnia się trzy sposoby realizacji pomiarów:
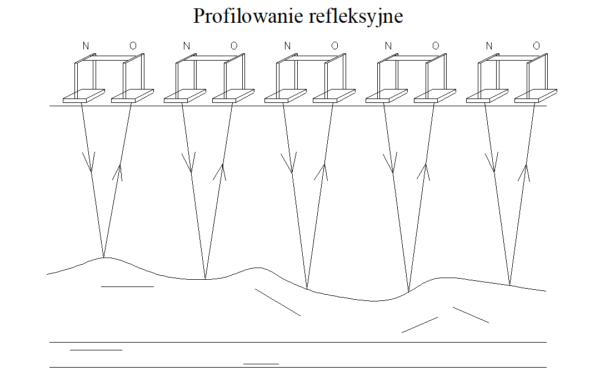
profilowanie refleksyjne,
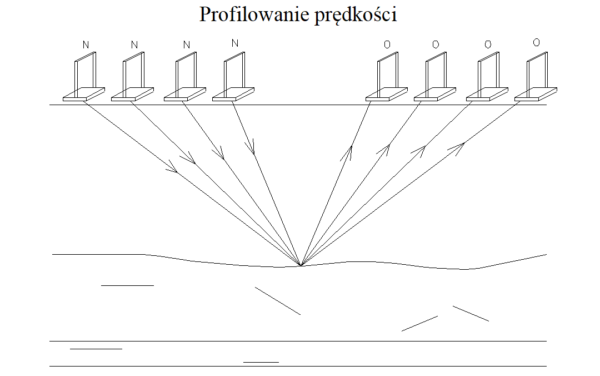
sondowanie prędkości,
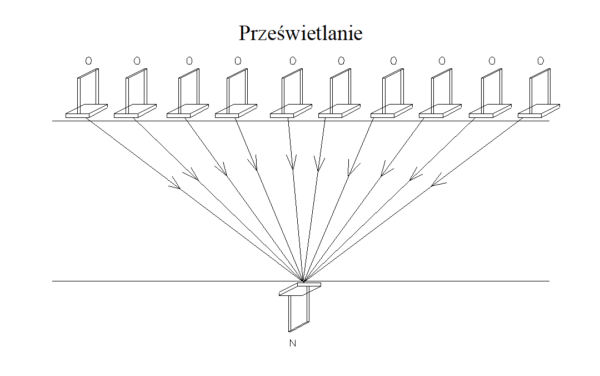
prześwietlanie.
Rys. 5 Profilowanie refleksyjne
Rys. 6 Profilowanie prędkości
Rys. 7 Prześwietlanie
Previous
Next
Profilowanie refleksyjne umożliwia obserwację zmian w rozkładzie struktur wewnętrznych ośrodka i wyznaczenie głębokości ich występowania. W oparciu o zapis georadarowy wyznacza się czas wyjścia impulsu sondującego i czas powrotu impulsu odbitego na granicy ośrodków. Wyznaczona różnica stanowi czas potrzebny na przebycie drogi: nadajnik – cel – odbiornik. Przyjmując odpowiednią wartość względnych przenikalności elektrycznych ośrodka propagacji, obliczana jest głębokość występowania w nim anomalii.
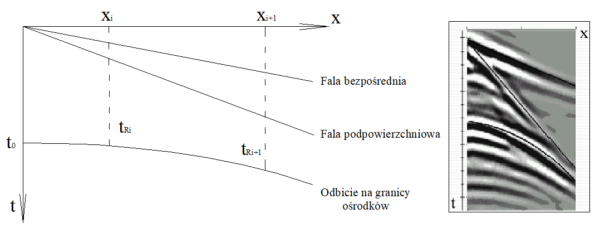
Profilowanie prędkości również wykorzystuje zjawisko odbicia fali na granicy ośrodków, jednak ta konstrukcja pomiarowa prowadzi do powstania radargramu o treści odmiennej niż w profilowaniu refleksyjnym. Wyróżnia się dwie konstrukcje pomiarów prędkości WARR (Wide Angle Reflection and Refraction) i CMP (Common Midpoint). W wyniku obu pomiarów otrzymuje się charakterystyczny radargram, na którym pojawiają się linie refleksyjne będące wynikiem odbioru fali bezpośredniej, przypowierzchniowej i odbitej na granicy ośrodków.
Rys. 8 Profilowanie prędkości
Jak wynika z rysunku, w przypadku fali bezpośredniej i przypowierzchniowej istnieje liniowa zależność pomiędzy czasem odbioru impulsu sondującego a zmianą odległości, jaka nastąpiła pomiędzy antenami w tym czasie. W przypadku fali odbitej na granicy ośrodków, zależność tę wyraża się krzywą drugiego stopnia. Rozwiązując układ równań dla dwóch dowolnych punktów należących do tej krzywej, otrzymujemy możliwość wyznaczenia głębokości granicy odbicia i prędkości fali w ośrodku propagacji nad granicą odbicia.
Prześwietlanie bazuje na tym, iż antena nadawcza i odbiorca znajdują się po dwóch stronach przegrody. Pomiar realizowany jest poprzez jednoczesny ruch obu anten lub poprzez ruch tylko jednej z nich. W ten sposób otrzymuje się zapis zmian czasu i mocy odebranego sygnału. Jeśli znana jest grubość przegrody to na podstawie uzyskanego wyniku określa się dodatkowo rozkład wartości względnej stałej elektrycznej ośrodka. Występowanie zmian stałej elektrycznej świadczyć będzie o występowaniu nieciągłości środowiska.
Rodzaje georadarów
Pod względem technicznych georadary można sklasyfikować poprzez:
Typ nadawanego sygnału:
Z modulacją amplitudy AM (Amplitude Modulation),
Z modulacją częstotliwości FM (Frequency Modulation),
Z komprecją impulsu,
Impulsowe (bez modulacji),
Z częstotliwości modulowaną falą ciągłą FMCW,
Ze schodkową modulacją częstotliwości SFCW.
Komercyjnie najczęściej stosowane są radary impulsowe.
Konstrukcje aparatury:
Jednokanałowe
Wielokanałowe
Konstrukcje anten:
ekranowane
nie-ekranowane w tym RTA (Rough Terrain Antena)
otworowe
W tym podziale będą dodatkowo występowały różne rodzaje anten (dipole, spiralne, tubowe)
Rys. 9 Georadar jednokanałowy Mala Ramac CUII
Rys. 10 Georadar wielokanałowy Leica Stream C
Previous
Next
W tym bardzo krótkim opisie można zauważyć różnorodność typów i konstrukcji georadarów co wskazuje, że nie ma jednego uniwersalnego narzędzia o charakterze ogólnym. Specyfiką metody georadarowej jest to, iż cel i obiekt poszukiwań definiuje dobór aparatury pomiarowej z bardzo szerokiego spektrum dostępnych rozwiązań.